Interested in collaborative multi-robot perception? Contact us!
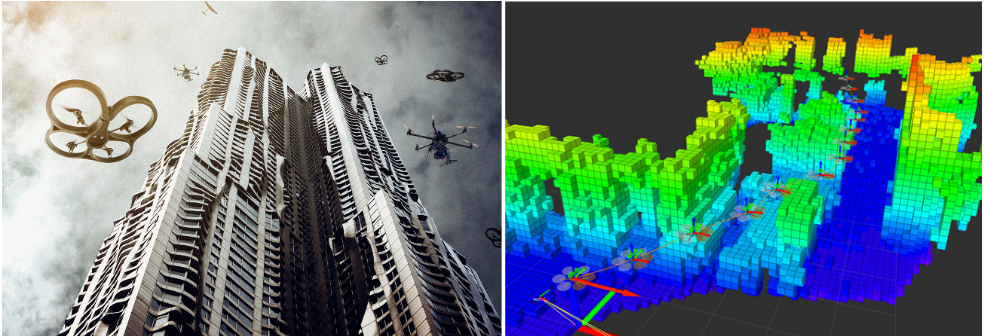
Numerous algorithms to implement and examine on real robots (quadortors), so much to learn - are you up for the challenge?
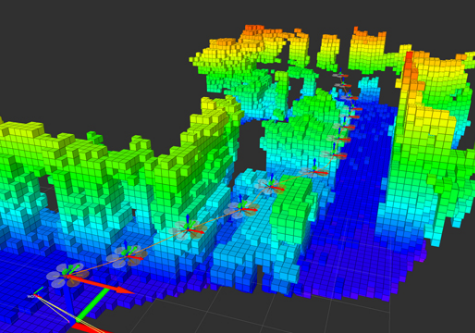
- Pose estimation and 3D reconstruction
- Collaborative RGBD sensing
- Autonomous navigation in unknown environments
- Online decision making under uncertainty
Prerequisites:
- Strong programming skills (preferably Python or C++). Background in (deep) reinforcement learning, computer vision, robotics is an advantage.
Academic supervisor:
- Prof. Vadim Indelman (email)
Duration: 1 or 2 semesters